汽车自动驾驶核心雷达技术详解:
自动驾驶系统中的雷达技术是确保车辆安全、稳定行驶的关键组成部分。以下是毫米波雷达、激光雷达(LiDAR)和超声波雷达这三种核心雷达技术的详解:
### 1. 毫米波雷达
毫米波雷达是一种利用毫米波(频率通常在30GHz到300GHz之间)的电磁波进行探测的雷达技术。以下是毫米波雷达的一些关键特点:
- "波长短":毫米波的波长非常短,这使得它可以穿透一些障碍物,如雾、雨和雪,提供更清晰的探测能力。
- "穿透性强":与超声波和激光雷达相比,毫米波雷达在恶劣天气条件下表现更佳,因为它不易受光线和天气条件的影响。
- "距离测量":通过测量发射波和反射波之间的时间差,毫米波雷达可以精确地测量目标物体的距离。
- "分辨率":毫米波雷达具有较高的空间分辨率,可以同时检测多个目标。
- "成本":毫米波雷达的成本相对较低,易于集成到车辆中。
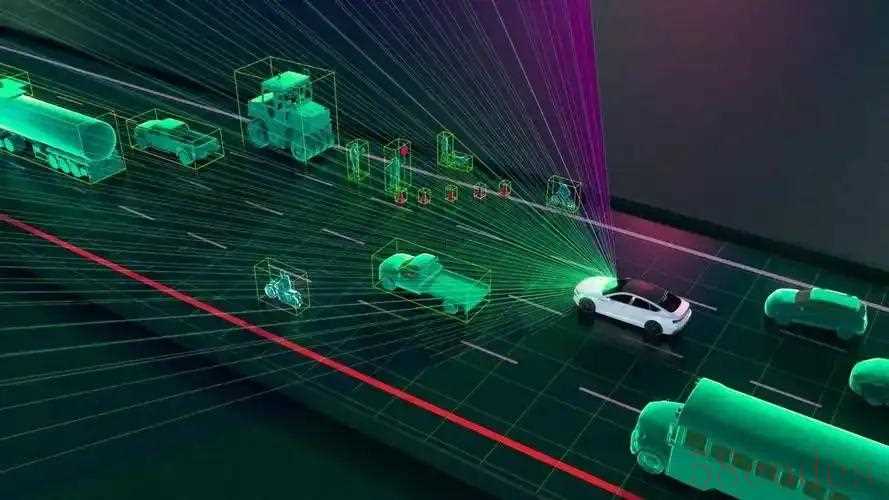
### 2. 激光雷达(LiDAR)
激光雷达,即光探测与测距(Light Detection and Ranging),是一种利用激光束来测量距离和构建周围环境的3D模型的技术。以下是激光雷达的一些关键特点:
- "高精度":激光雷达可以提供非常精确的距离测量和高度分辨率,这使得它可以生成非常详细的环境地图。
相关内容:
汽车自动驾驶系统主要使用以下几种雷达技术,它们各自有不同的特性和应用场景:
一、毫米波雷达
1. 原理:利用波长在毫米级别(频率通常在24GHz、77GHz、79GHz)的电磁波进行探测。

2. 特点:
全天候能力强:穿透雾、雨、雪、灰尘的能力强,受恶劣天气影响相对较小。
测速精准:利用多普勒效应,对目标物体的相对速度测量非常精确。
探测距离远:通常可达100-250米以上(长距离雷达)。
成本相对较低:技术成熟,成本低于激光雷达。
分辨率有限: 传统毫米波雷达的角度分辨率(区分横向距离很近的物体)和高度信息感知能力相对较弱。
3.应用:是当前自动驾驶(尤其是L2/L2+级辅助驾驶)中最核心和普及的雷达传感器。主要用于:自适应巡航控制、自动紧急制动、盲点监测、变道辅助、后方碰撞预警。

4.发展趋势:4D成像毫米波雷达正在兴起,它通过增加发射和接收通道,显著提升了角度分辨率和测高能力,能够生成有点云特征的图像,性能更接近低线束激光雷达,成本优势明显,是未来重要的传感器。
二、激光雷达
1.原理:发射激光束(通常是近红外光),通过测量激光发射到被物体反射回来的时间来确定距离。通过快速扫描,构建出周围环境的高精度三维点云图。
2.特点:
分辨率极高:能够生成极其精细的环境3D模型,精确识别物体的轮廓、形状、大小和类别(如区分行人、车辆、自行车)。
测距精度高:距离测量精度通常在厘米级。
受天气影响较大:浓雾、大雨、大雪会显著衰减激光信号,影响性能。
成本较高:虽然价格在快速下降,但目前仍是自动驾驶系统中成本较高的传感器之一。
阳光干扰:强烈的直射阳光可能干扰某些激光雷达的工作。
3.应用:是高级别自动驾驶(L3及以上)的关键传感器之一,尤其在需要高精度环境感知和定位的场景(如Robotaxi)。用于:构建高精度环境地图、精确识别和跟踪障碍物、车道线检测(尤其在无清晰标记时)、定位与地图匹配
4.类型:分为机械旋转式、半固态(MEMS振镜、转镜)、纯固态(OPA光学相控阵、Flash泛光)等,固态化是降低成本和提高可靠性的主要方向。
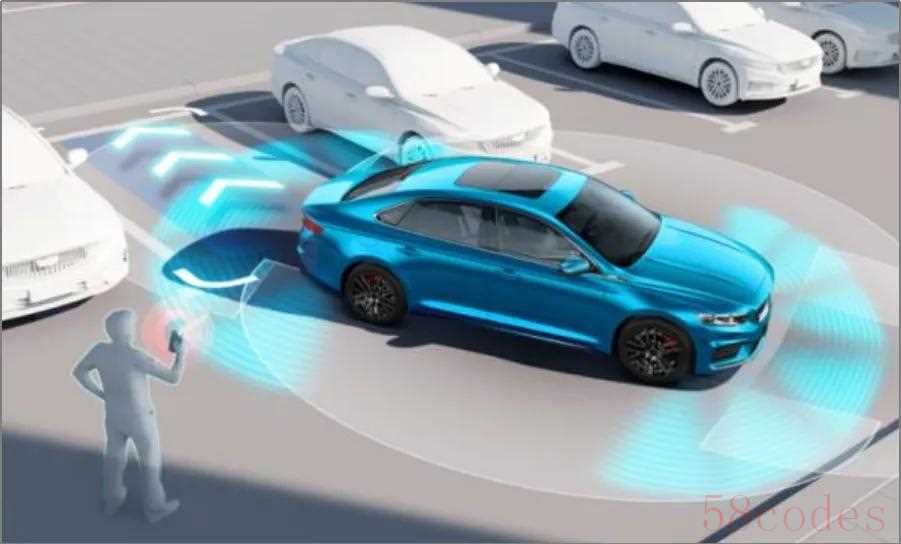
三、超声波雷达
1.原理:利用超声波(频率高于20kHz)进行探测。
2.特点:
短距离探测:有效探测距离很短,通常在几米以内(0.1-5米)。
成本极低:非常成熟且便宜的传感器。
精度有限:主要用于探测近距离障碍物的存在,精度和分辨率不高。
易受干扰:声波易受风噪、其他超声波源干扰。
3.应用:主要用于自动泊车和低速近距离障碍物探测(如倒车雷达、泊车辅助)。在高速行驶的自动驾驶感知中作用有限,是辅助角色。
四、总结与协同工作:
1.毫米波雷达是自动驾驶的主力军,提供可靠的中远距离目标探测、测速和全天候能力,成本效益高。
2.激光雷达是高级别自动驾驶的高精度眼睛,提供无与伦比的环境三维建模和细节感知能力,但成本和天气适应性是挑战。
3.超声波雷达是近距离专家,专精于低速泊车和短距避障。
4.传感器融合:没有任何一种传感器是完美的。现代自动驾驶系统都采用多传感器融合的策略,将毫米波雷达、激光雷达、摄像头、超声波雷达甚至GPS/IMU的数据结合起来,利用各自的优势,弥补各自的不足,从而实现对周围环境更全面、更鲁棒(稳定可靠)的感知。例如:
毫米波雷达提供准确的速度和位置(尤其纵向)。
激光雷达提供精确的形状和轮廓。
摄像头提供丰富的颜色、纹理、语义信息(如识别交通灯、路标)。
超声波雷达处理近场盲区。

五、未来趋势:
4D成像毫米波雷达性能不断提升,成本优势使其在主流车型中大规模应用。
激光雷达技术持续发展,固态化降低成本,提升可靠性和量产能力,逐步下探到更多车型。
传感器融合算法越来越先进和智能化,是提升自动驾驶系统性能的关键。
综上所述,毫米波雷达(尤其是向4D成像演进)和激光雷达是汽车导航最核心的两种雷达,它们共同构成了自动驾驶感知系统的骨干,而超声波雷达则扮演辅助角色。
 微信扫一扫打赏
微信扫一扫打赏
 支付宝扫一扫打赏
支付宝扫一扫打赏
