这是一个关于特斯拉在ICCV会议上发布世界模拟器并介绍其端到端自动驾驶技术路线的重要信息。
根据你提供的信息,可以总结出以下几点关键内容:
1. "事件:" 特斯拉在"国际计算机视觉大会 (ICCV)" 上举行了重要活动。
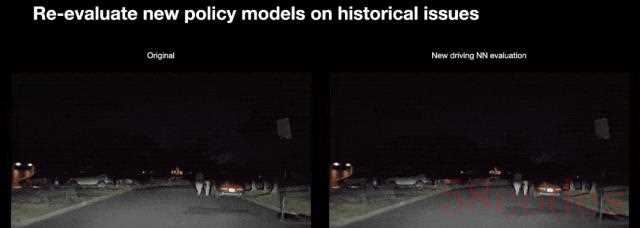
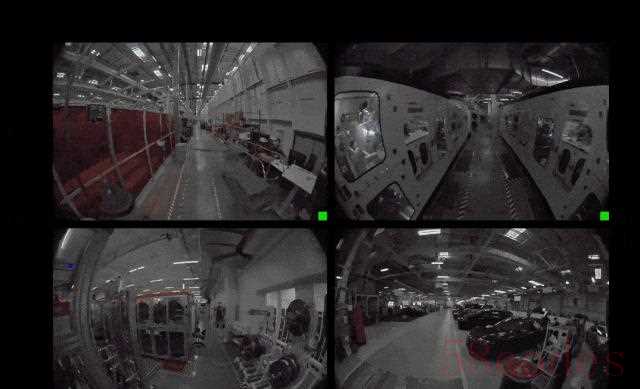
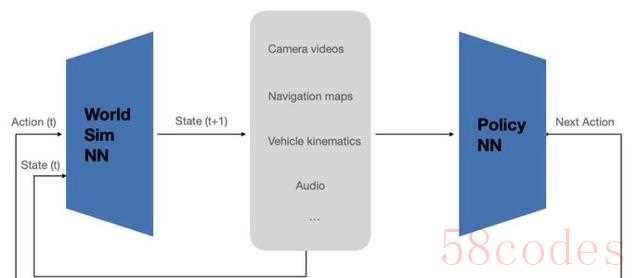
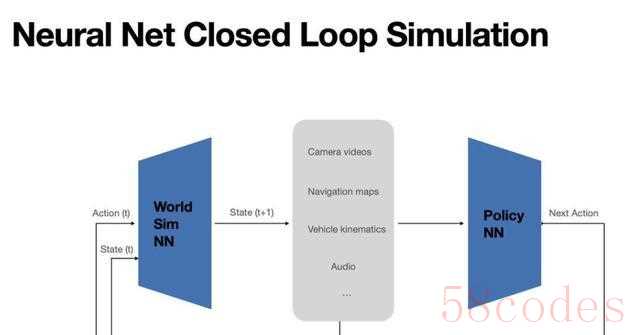
2. "核心展示:" 发布了"特斯拉世界模拟器 (Tesla World Simulator)"。这是一个强大的模拟工具,旨在用于自动驾驶技术的开发和测试。
3. "高层参与:" "特斯拉副总裁 (VP)" 亲自出席并参与了解密过程,表明了公司对此项技术的重视。
4. "核心技术路线:" 重点介绍了特斯拉的"端到端 (End-to-End)" 自动驾驶技术路线。这意味着特斯拉正在开发一种直接从传感器输入到车辆控制输出(如转向、加速、制动)的完整、统一的AI系统,可能绕过传统分层感知和规划方法。
5. "目的与意义:"
"加速研发:" 利用世界模拟器进行大规模、高效的自动驾驶算法测试和迭代。
"提升安全性:" 通过模拟各种极端和罕见场景来提升系统的鲁棒性和安全性。
"推动技术进步:" 表明特斯拉在追求更高阶、更自主的自动驾驶能力,并可能寻求通过端到端学习实现这一目标。
"总结来说:" 特斯拉在ICCV上通过发布世界模拟器,并由VP亲自解读,展示了其在自动驾驶领域,
相关内容:
你开特斯拉的时候,是不是也觉得它“懂你”?

不是导航准,是它好像真知道你下一秒要干嘛。
这不是玄学,是背后有个叫“世界模拟器”的东西,在脑子里给你演了十万遍路况。
2024年8月,特斯拉悄悄把暴雨、沙尘暴这些“地狱模式”加进了FSD测试版。
不是PPT演示,是真能模拟雨刮器糊了、能见度不到十米时,车怎么自己避让、减速、找安全带。
你刷手机看到“自动驾驶下雨天出事”的新闻,它早就在虚拟世界里撞了上千次,才敢让你上路。
更狠的是,这玩意儿不光教车开车,还教机器人走路。
Optimus那个铁疙瘩,现在能在模拟家里端杯子、绕椅子、捡地上的袜子——不是靠预设程序,是靠“看”了无数家庭场景后自己悟出来的。
你以为机器人离你很远?
它已经在你家客厅的数字副本里练了半年。
英伟达和Waymo不是坐着看热闹。
DriveSim现在能同时模拟激光雷达、摄像头、毫米波雷达一起“瞎”,然后看系统怎么破局。
华为、蔚来还在埋头做“世界模型”,觉得得先让AI懂物理、懂常识;理想、元戎启行却偏要走VLA路线——靠海量短视频和互联网数据喂出直觉。
两种路子,像文科生背书和理科生做实验,谁对?
现在没人敢打包票。
但特斯拉的底气,是它真敢把20亿个数据Token塞进一个神经网络,用生成式高斯泼溅技术,把马路、行人、车灯、反光全“画”出来,再让车自己学着应对。
这不是调参,是让AI从零开始“看世界”。
你开车靠经验,它靠的是在虚拟世界里活了上万年。
有人说这不安全,说系统像黑箱,极端情况处理不了。
可你想想,人类司机不也靠直觉?
你没学过物理,但你知道红灯亮了别冲。
特斯拉的系统,现在就是那个“没学过物理但知道别冲”的司机。

最讽刺的是,当年说马斯克疯了的人,现在都在偷偷抄作业。
世界模拟器不是唯一解,但它是最敢赌的那一个。
它不靠地图,不靠高精定位,不靠一堆传感器堆料——它就靠一个模型,看世界,理解世界,然后预测世界。
你可能觉得自动驾驶还远,但当你下次在暴雨天看到一辆特斯拉自己稳稳靠边,别惊讶。
它不是运气好,是它在数字世界里,已经淋了十年雨。
 微信扫一扫打赏
微信扫一扫打赏
 支付宝扫一扫打赏
支付宝扫一扫打赏
