是的,你提到的这个概念确实与麻省理工学院(MIT)的研究方向密切相关,特别是涉及到"自重构机器人(Self-Reconfiguring Robots)"或"模块化机器人(Modular Robots)"。
这个想法的核心是:"机器人由许多小的、标准化的模块组成,这些模块能够像搭积木一样相互连接、断开、重组,从而改变自身的形态和功能,甚至能够自主地制造出新的机器人或修复损坏的部分。"
MIT 在这个领域进行了开创性和持续性的研究:
1. "早期探索":MIT 的教授(如 "Hiroshi Ishikawa" 和 "Rodney Brooks" 等及其团队)很早就开始研究能够移动、连接和断开的模块化机器人。
2. "“Molecule”项目":Ishikawa 教授的实验室开发过名为 "Molecule" 的机器人,它们可以像细胞一样分裂和合并,形成更大的结构或完成特定任务。
3. ""RoboLego"(已更名)":虽然名字里有 Lego,但这并非使用乐高积木,而是一个研究项目,探索了模块化机器人如何通过简单的连接机制实现复杂的行为和形态变化。
4. "软体机器人研究":MIT 在软体机器人领域也有深入研究,这些软体机器人通常由可变形的材料制成,也具有类似积木的变形和重组能力,更加灵活和
相关内容:
What,机器人都已经进化到能自己造自己了?!麻省理工(MIT)的研究人员脑洞大开,于是有了这番情景:机器人1号忙前忙后,一边挑选零件,一边自主组装。不一会儿后,一模一样的机器人2号就地诞生!Alex 发自 凹非寺
量子位 | 公众号 QbitAI
 还没完,机器人2号刚来到这个世界,立刻就能和1号那样灵活运动,然后它还给自己“戴上”2个饰品,哦不,配件。
还没完,机器人2号刚来到这个世界,立刻就能和1号那样灵活运动,然后它还给自己“戴上”2个饰品,哦不,配件。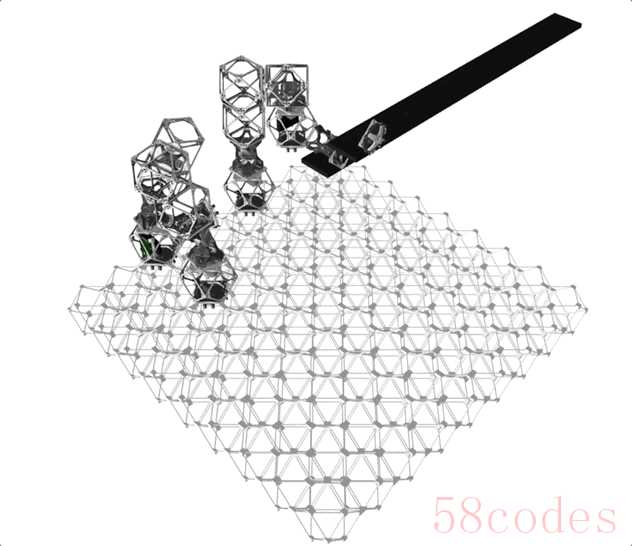 好家伙,这算是机器人“套娃”吗???
好家伙,这算是机器人“套娃”吗??? MIT的研究者指出:
MIT的研究者指出:相关研究论文已登上了Nature子刊Communications Engineering。这种机器人除了能克隆自己外,还能分层搭建出更大的机器人。
按此思路,以后造大型建筑或大型机械设备时,或许可以让小模块像搭积木似的一步步构造,不用再在旁边弄个巨型机床之类的了。
这样能大大提高建造效率!
神奇的“智能”模块
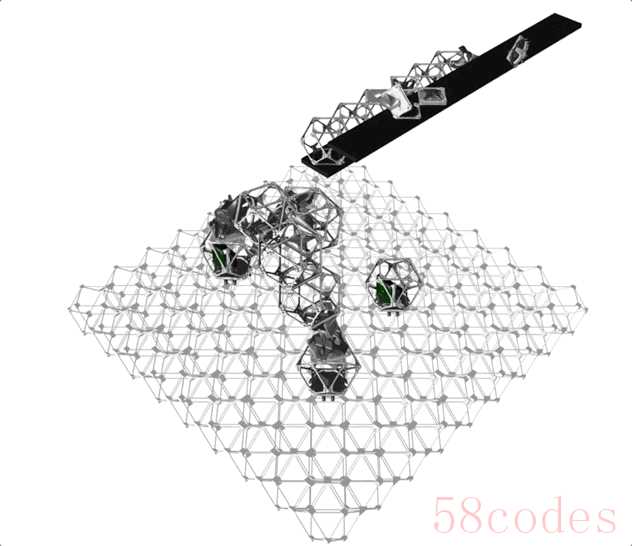
从前文的动图中不难看出,这种机器人能如此快速地克隆自己,主要得益于它的一块块“零件”,研究者称之为Voxel。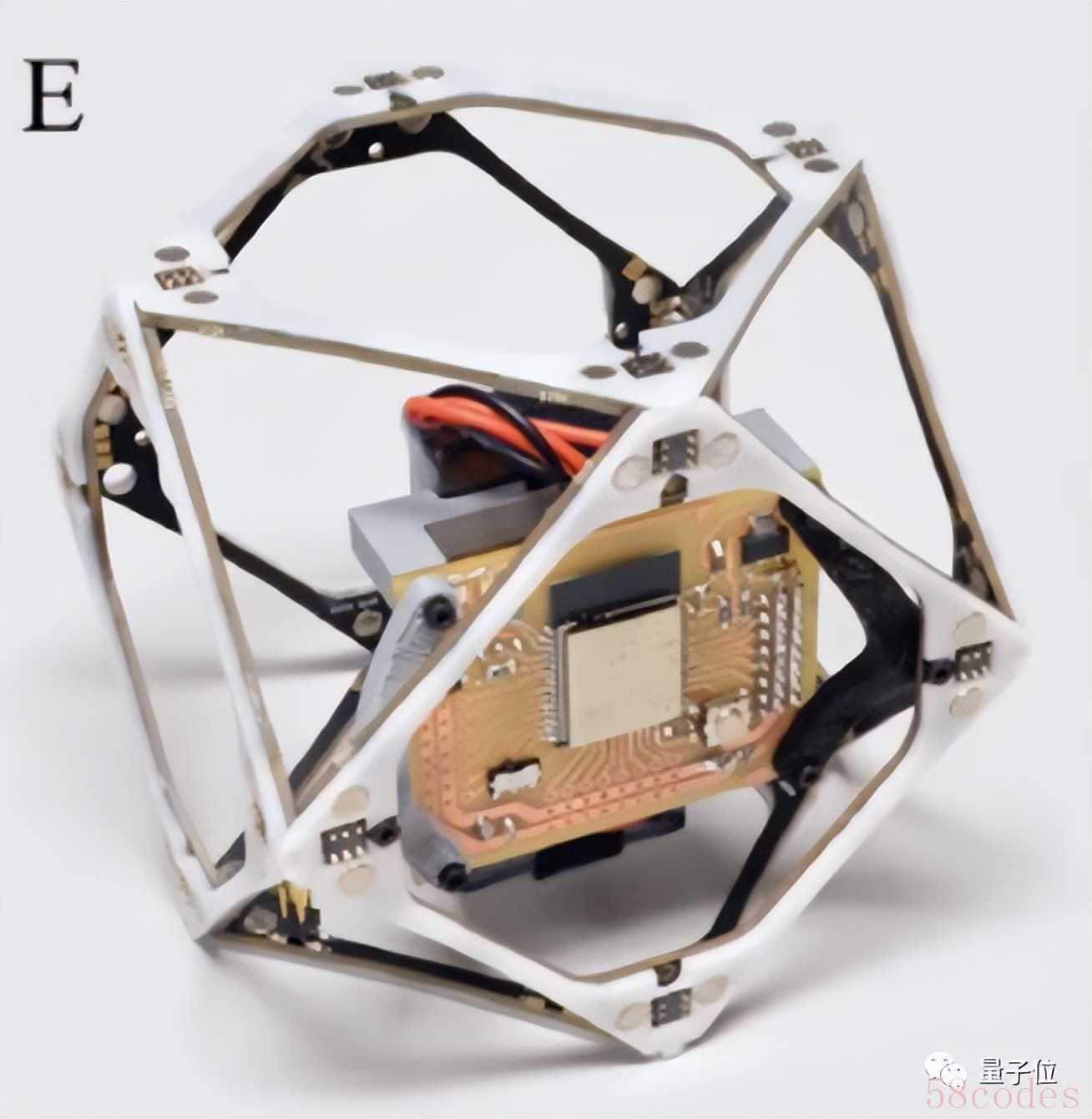 Voxel一词是体积像素(Volume Pixel)的简称,我们可以简单把它理解为模块。至于模块为什么会长成这样,研究者称,灵感来源于晶格,也就是原子在晶体中排列规律的空间结构。立方八面体的结构具有低密度以及高刚度的优势,还方便搭建和拆卸。这些模块除了有机械结构之外,还有智能控制系统。模块内部搭载了电池,还有中央处理器和执行器等,让其可以灵活地动起来,还能自主导航。而模块边沿则装有磁吸弹簧针连接器,两个模块只需要“贴贴”,就可以牢固地连在一起:就算没有电线,每组面对面连接也能在10V电压下,传输8A的电流和50N的拉伸力。不过仅靠运动还不够,机器人选取零件和搭载新机器人的过程还涉及抓取的动作。所以研究团队还给机器人设计了“手腕儿”。
Voxel一词是体积像素(Volume Pixel)的简称,我们可以简单把它理解为模块。至于模块为什么会长成这样,研究者称,灵感来源于晶格,也就是原子在晶体中排列规律的空间结构。立方八面体的结构具有低密度以及高刚度的优势,还方便搭建和拆卸。这些模块除了有机械结构之外,还有智能控制系统。模块内部搭载了电池,还有中央处理器和执行器等,让其可以灵活地动起来,还能自主导航。而模块边沿则装有磁吸弹簧针连接器,两个模块只需要“贴贴”,就可以牢固地连在一起:就算没有电线,每组面对面连接也能在10V电压下,传输8A的电流和50N的拉伸力。不过仅靠运动还不够,机器人选取零件和搭载新机器人的过程还涉及抓取的动作。所以研究团队还给机器人设计了“手腕儿”。 这个“关节”比其他模块更灵活,方便机器人“拿起”零件以及分层搭建。接下来,机器人就可以有条不紊地克隆自己了。
这个“关节”比其他模块更灵活,方便机器人“拿起”零件以及分层搭建。接下来,机器人就可以有条不紊地克隆自己了。幕后的集中控制程序
到这里,还有一个问题:机器人是如何抓取正确的模块,并按顺序拼出想要的新结构?研究人员开发了一个集中控制程序。通过这个程序,机器人可以自我复制、离散化形状、规划移动路径,并合理分配任务。首先,机器人的计算系统会根据给定目标形状,自动生成适合的构建序列。通过编译器,将输入的几何体离散成有序的分层构建块。然后,系统还会分析出最佳组装顺序,来提高效率并防止过程混乱。也就是说,机器人不仅能复制粘贴自己,还能分层搭出更大的机器人或者其他结构。举个栗子~如果现在要建造一个大圆锥,第一步需要人在集中控制程序处输入这个“施工目标”。然后系统就会自动将这个形状拆分开,确定施工顺序,并确定施工队的组成,告诉第一个机器人还需要多少个小伙伴来完成任务。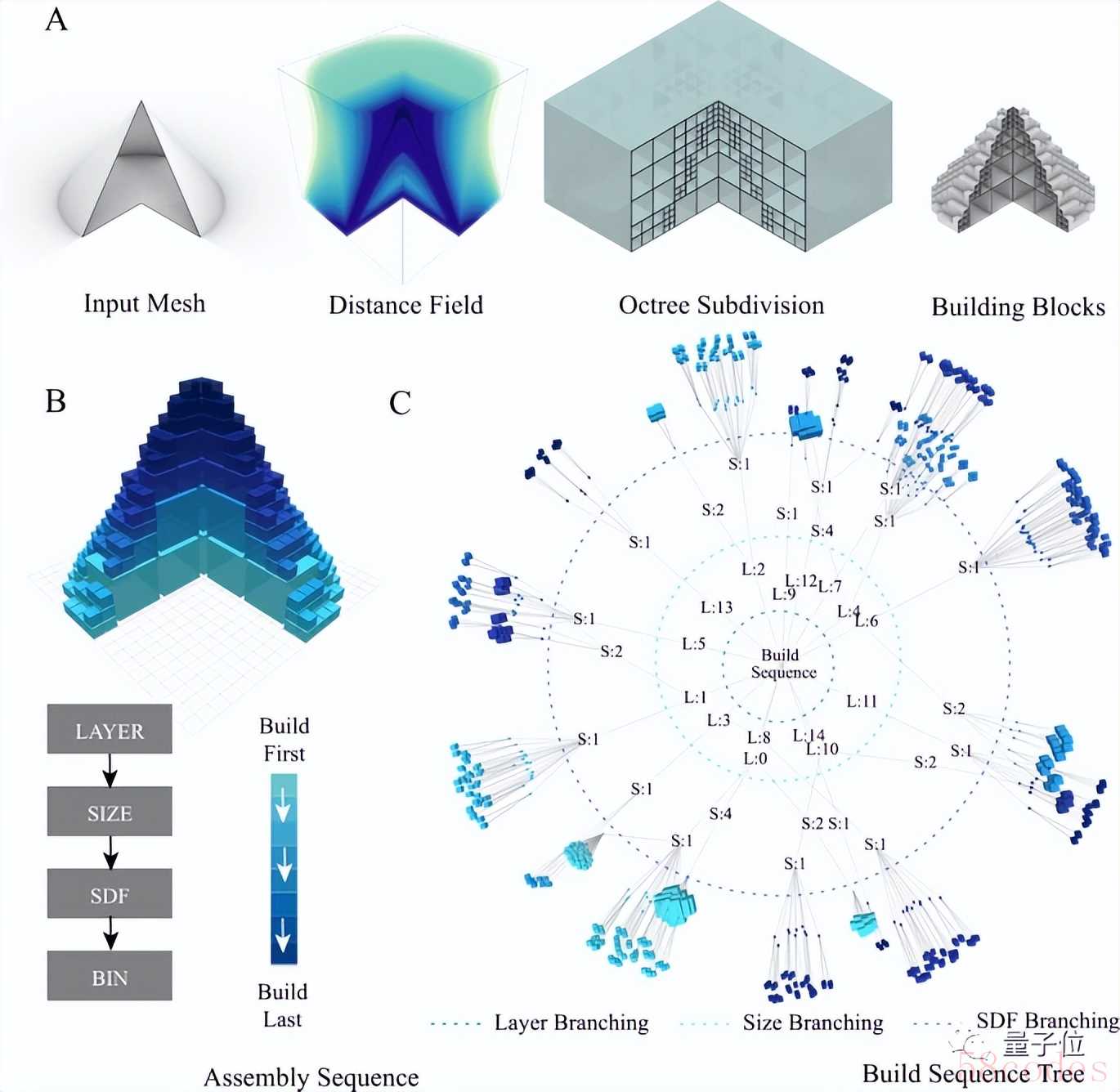 然后,系统会发出指令,让第一个机器人以递归的方式造出自己的工友。接着,系统还会分配任务,运用贪心算法找到最高效的施工路径,避免一群机器人发生碰撞。分层算法则用来分解施工步骤,小机器人制造组件,大机器人则负责将做好的组件搭起来。
然后,系统会发出指令,让第一个机器人以递归的方式造出自己的工友。接着,系统还会分配任务,运用贪心算法找到最高效的施工路径,避免一群机器人发生碰撞。分层算法则用来分解施工步骤,小机器人制造组件,大机器人则负责将做好的组件搭起来。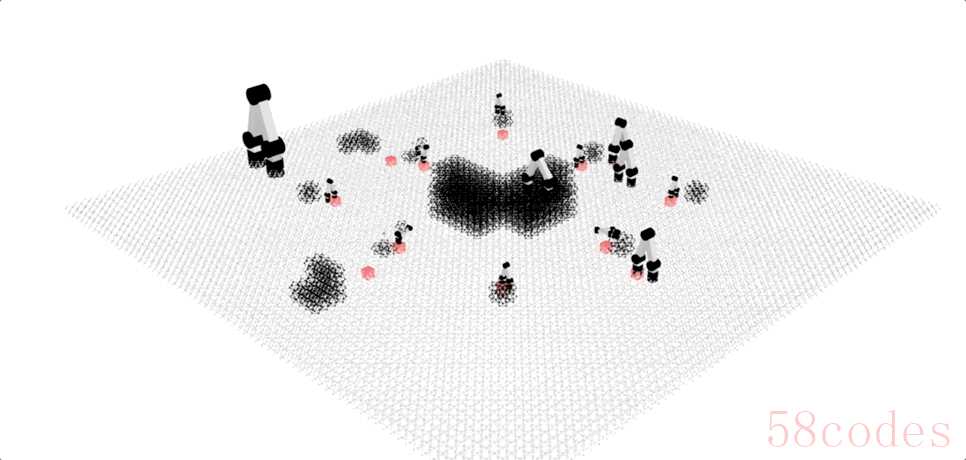 不过,研究者也指出,在实操过程中,部件还不够灵活(开头的动图是模拟环境中的样子),目前他们正在研究开发更强大、灵敏的连接器。
不过,研究者也指出,在实操过程中,部件还不够灵活(开头的动图是模拟环境中的样子),目前他们正在研究开发更强大、灵敏的连接器。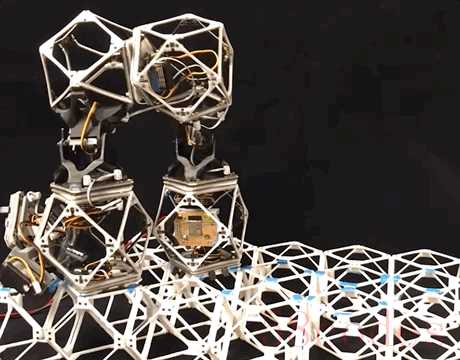
研究者简介
研究人员来自MIT的比特与原子研究中心以及美国陆军研究实验室。论文一作兼通讯作者Amira Abdel-Rahman,现为MIT在读博士研究生,硕士毕业于哈佛大学技术设计研究专业。 她的主要研究方向为,利用计算机来分析制造过程和制造系统。系统整体构思的设计者为Neil Gershenfeld教授,现为MIT比特和原子研究中心主任,他也是美国物理学会会员。
她的主要研究方向为,利用计算机来分析制造过程和制造系统。系统整体构思的设计者为Neil Gershenfeld教授,现为MIT比特和原子研究中心主任,他也是美国物理学会会员。 MIT比特和原子研究中心,目前正在致力于打破计算机科学和经典物理学之间界限,探索如何把数据和硬件更好地结合联动。论文地址:
MIT比特和原子研究中心,目前正在致力于打破计算机科学和经典物理学之间界限,探索如何把数据和硬件更好地结合联动。论文地址:https://www.nature.com/articles/s44172-022-00034-3
参考链接:
https://techcrunch.com/2022/11/22/researchers-are-building-robots-that-can-build-themselves/— 完 —量子位 QbitAI · 号签约关注我们,第一时间获知前沿科技动态
 微信扫一扫打赏
微信扫一扫打赏
 支付宝扫一扫打赏
支付宝扫一扫打赏
