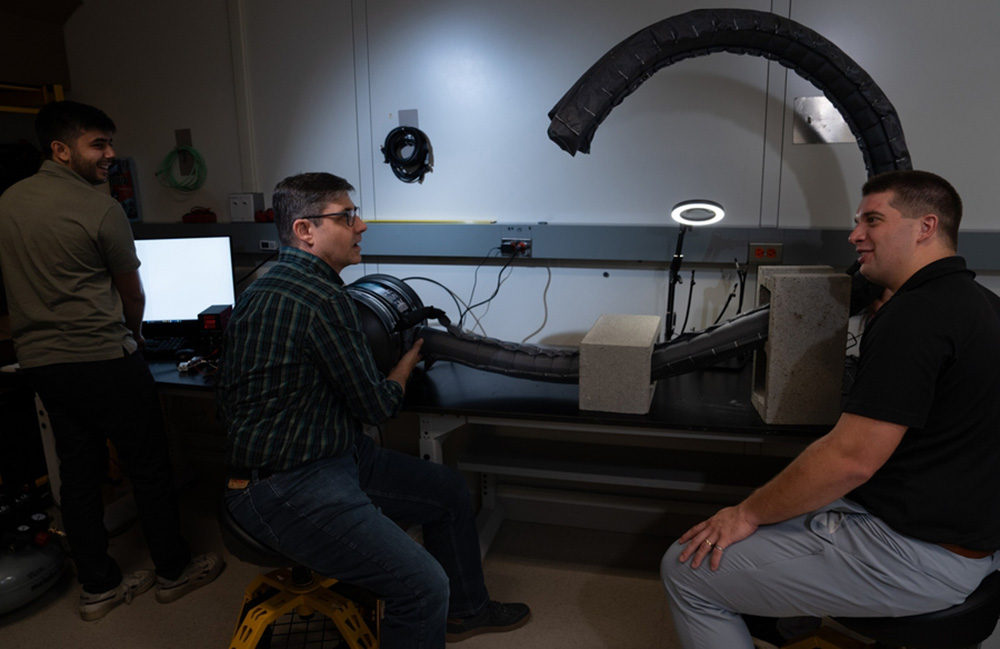
从左到右:研究实习生Ankush Dhawan和Lincoln实验室工作人员Chad Council和Nathaniel Hanson在实验室环境中测试了一个藤蔓机器人。 |资料来源:MIT News
MIT Lincoln实验室的研究人员与Notre Dame大学合作创建了一个类似藤蔓的机器人,可以在瓦砾之间挤压。在灾难性的结构崩溃后,机器人可以减轻紧急响应者的负担。
当重大灾难袭来时,应急人员负责寻找被困在瓦砾下的人并小心地将这些受害者从危险环境中解救出来。这项艰苦的,全天候的工作可能会持续数天或几周,具体取决于灾难的大小。
,而腿部机器人已经在灾难恢复的情况下工作以调查瓦砾的顶部,但在紧张,不稳定的地方可能会损坏它们。联合研究团队创建了软路线的机器人观察单元或SPROUT。这个新系统可以在障碍物和小空间中操纵。
软机器人可以用空气充气和放气,以在倒塌的结构下扭动其方式。麻省理工学院 - 诺特尔夫人研究人员说,紧急响应者可以远程控制它以探索,映射和通过碎屑找到最佳入口路线。
“城市搜索和救援环境都可能是残酷且宽容的,甚至最顽固的技术努力运作。 “葡萄机器人的基本方式减轻了其他平台面临的许多挑战。”
发芽是与巴黎圣母院大学教授兼麻省理工学院毕业生玛格丽特·科德(Margaret Coad)合作开发的。当寻找合作者纳撒尼尔·汉森(Nathaniel Hanson) - 巴黎圣母院的毕业生,该小组的领导者 - 已经意识到Coad在藤蔓机器人上进行工业检查的工作。
的设计挑战发芽
发芽面临的挑战是由充气管的气密织物组成的。该管从固定底座上解开,并用电动机控制部署。在管的尖端,团队安装了一个相机和其他传感器。随着管的膨胀,它会膨胀成碎石,在紧密的段落中挤压,而其传感器图像并映射环境。
当前,可以使用操纵杆和显示机器人相机供稿的屏幕进行发芽。它最多可以部署10英尺(3 m),并且该团队正在努力将其扩展到25英尺(7.6 m)。
Sprout的灵活设计使其能够进入小空间,但也给研究人员带来了许多技术挑战。例如,团队必须创建一个控制系统,该系统可以查明如何在可变形机器人内施加气压,以便它移动OPE的位置rator is directing it to go.
In addition, the team had to design the tube to minimize friction while the robot grows and engineer the controls for steering.
Register now so you don't miss out!
Building maps of collapsed areas and testing SPROUT
The MIT team said it has been finding new ways to apply its mobile robot浮雕的努力,例如使用遥控系统捕获的数据来构建地下空隙的地图。
“崩溃事件很少但毁灭性的事件,”汉森说。 “在机器人技术中,我们通常需要基础真实的测量来验证我们的方法,但是这些方法根本不存在于崩溃的结构中。”
解决这个问题,Hanson和他的团队制作了一个模拟器,使他们可以创建倒塌的结构的逼真的地面,并开发了绘制量的杂物,以绘制绘制的效果。马萨诸塞州特遣队1 Tra在马萨诸塞州贝弗利的INING网站。这些测试使研究人员能够提高机器人的耐用性和可移植性,并学习如何更有效地生长和引导机器人。该团队计划在今年春季进行一项更大的实地研究。
“城市搜索和撤退团队和第一响应者在其社区中起关键作用,但通常很少没有研发预算,”汉森说。他补充说:“该计划使我们能够将藤蔓机器人的技术准备水平推到一个响应者可以与系统进行动手演示的地步。”该团队设想了用于维护军事系统或具有难以访问的位置的关键基础设施的技术。最初的计划着重于绘制空间空间,但未来的工作旨在定位危害并评估操作的可行性和安全性t瓦特瓦德(Chad Council)在马萨诸塞州特遣部队1站点通过瓦砾导航机器人。 |资料来源:麻省理工学院研究人员
 微信扫一扫打赏
微信扫一扫打赏
 支付宝扫一扫打赏
支付宝扫一扫打赏

