Okay, let's break down this request: "干掉摄像头解串行,改成以太网,英伟达Thor的HSB".
This translates to roughly: "Remove the serial camera, convert to Ethernet, using the HSB (High Speed Bridge) on the NVIDIA Thor module."
Here's a detailed explanation and breakdown of what this involves:
1. ""干掉摄像头解串行" (Remove the serial camera, de-serialize):"
"Serial Camera:" This likely refers to a camera (or camera interface) that uses a serial communication protocol like MIPI CSI-2 (Serial Data Interface) to transmit video data. NVIDIA Jetson modules, including Thor, typically have MIPI CSI-2 inputs for connecting cameras.
"解串行 (De-serialize):" This means you want to take the parallel video data stream coming from the camera's sensor (which is serialized into a serial format like MIPI CSI-2) and potentially process it or prepare it for a different type of transmission. However, in the context of converting to Ethernet, the crucial step is usually to get the video data out of the CSI-2 interface in a usable format (like YUV, RGB, NV12) on the Jetson Thor.
2. ""改成以太网" (Convert to Ethernet):"
You want to transmit the video data over a standard Ethernet network instead of using the native MIPI
相关内容:
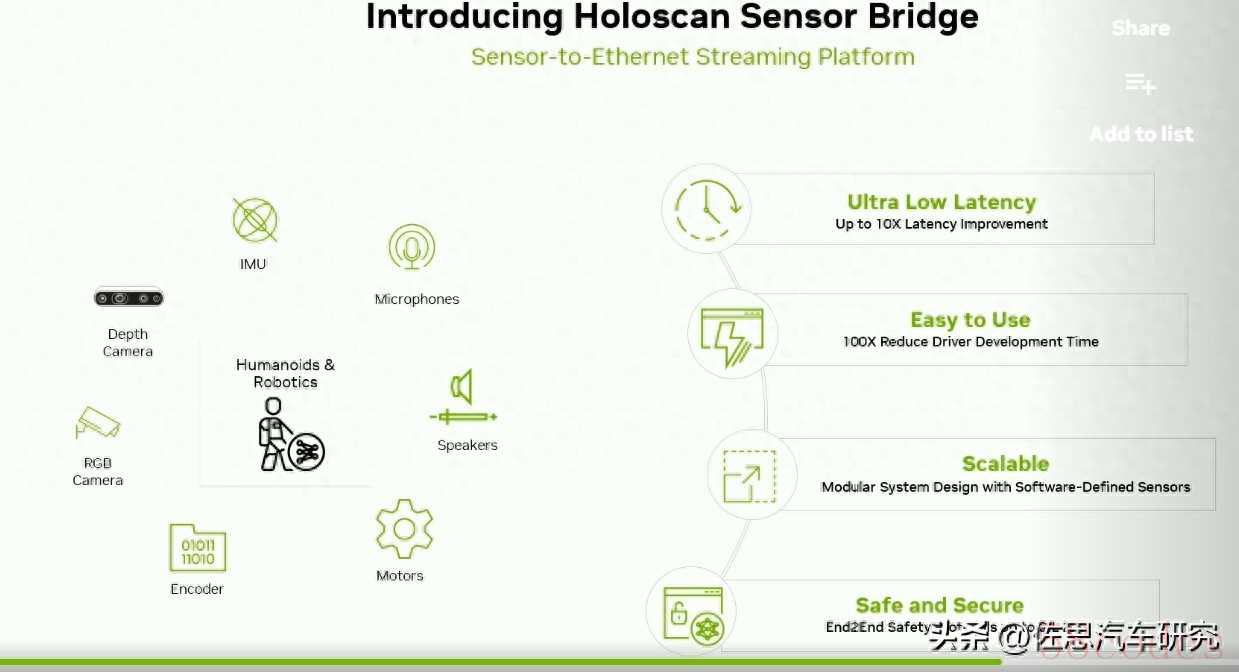
HSB简介
 图片来源:英伟达
图片来源:英伟达众所周知,目前摄像头视频传输格式主要是MIPI CSI-C或D,主要是解串行方式,就是摄像头端加串行器,SoC端加解串行器,基本就是美国ADI的GMSL垄断市场,特别是车载市场,为什么要用以太网代替解串行,以太网有什么优势?
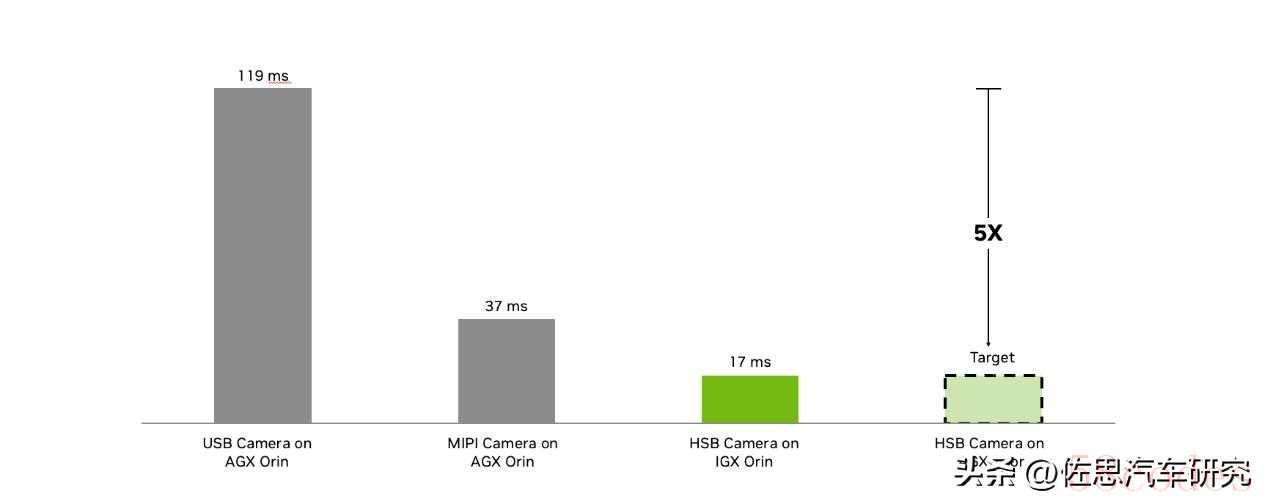
以太网最大优势就是低延迟。现代嵌入式边缘系统需要具有不同接口、高分辨率、快速帧率、低延迟和精确同步的摄像头。HSB 的延迟比 USB 摄像头低 5 倍,延迟比 MIPI 摄像头低 1.5 倍,玻璃到玻璃的延迟低至 17 毫秒,从而满足这些需求。通过使用 RDMA 和以太网摄像头,它可以将数据直接传输到 GPU 内存,而 CPU 利用率几乎为零,从而缩短响应时间并实现实时操作。
几种摄像头传输视频传输延迟对比
 图片来源:英伟达
图片来源:英伟达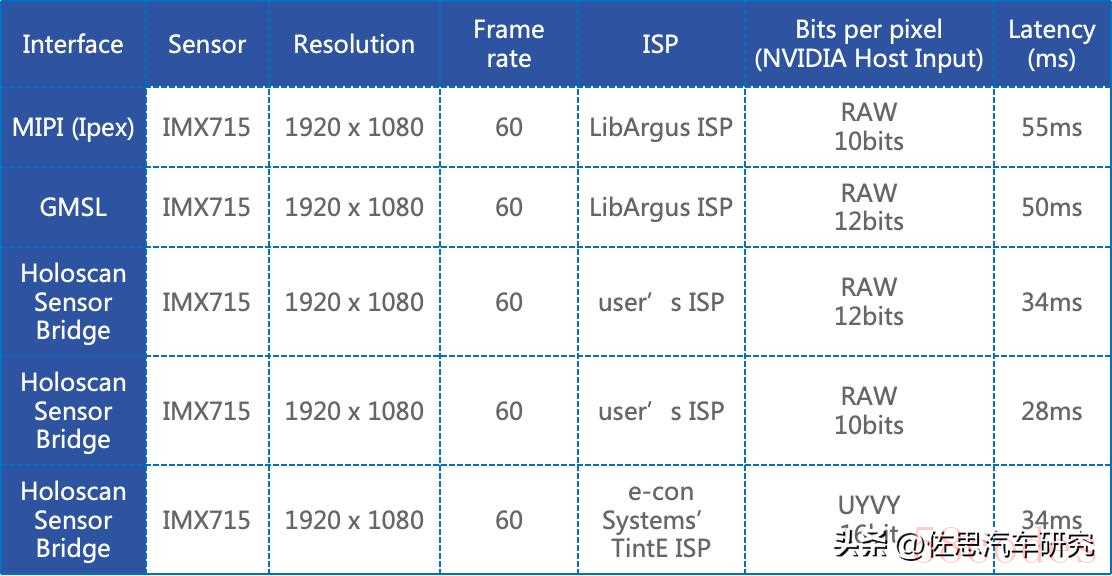 数据来源:e-con Systems
数据来源:e-con Systems这里使用的IMX715本身有829万有效像素,但采用水平垂直两线binning像素合并驱动,分辨率降低为1920*1080。这是科研和工业领域常用的一种手段,在数码相机中,每个像元根据 “激活 ”曝光时接收到的光量记录场景的强度值。在线阵扫描应用中,每次曝光仅采集图像的一行。由于曝光期极其短暂,传感器像元也许只能捕捉到少量光线,从而导致图像暗淡,细节模糊。“像素合并”功能可将两个相邻像元捕捉到的光线进行叠加,然后将合并的像素值输出为单一像素。例如,对于每行 4096 个像素的线阵扫描传感器,每两个像元合并在一起后,输出的线阵像素为总像素的一半 (2048), 但亮度加倍。两条线同时曝光,并在水平、垂直或两个方向上同时组合像元,做到输出的每个像素覆盖拍摄目标上更大的区域,并显著提升亮度。启动水平和垂直合并选项后,亮度最高可达原来的四倍,信噪比也更高,对于高速移动目标,非常有必要。
200万像素10比特色彩下HSB比GMSL要快大约16秒,分辨率越高,HSB低延迟越明显。
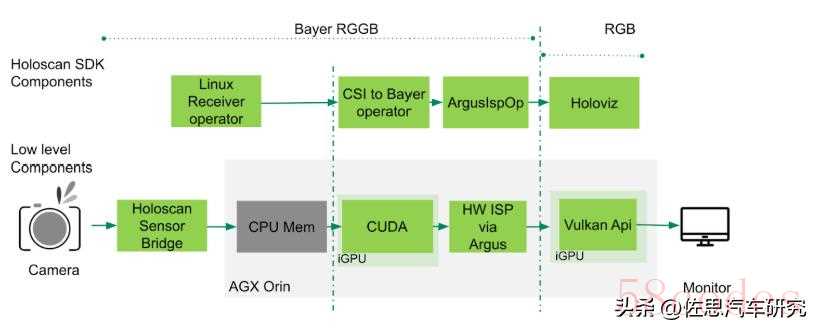
对于传统的移动行业处理器接口 (MIPI) 摄像头,摄像头流水线通常需要多个内核空间驱动程序,在将数据传递到 GPU 显存之前,先将数据发送到 CPU 显存。借助 HSB,传统的内核空间驱动将被用户空间 API 取代,开发者无需为摄像头和控制功能创建单独的驱动。这种简化的方法使开发者能够专注于应用程序逻辑,而不是低级驱动开发。它还具有灵活性,支持与一系列图像信号处理器 (Image Signal Processor, ISP) 选项集成,包括基于NVIDIA CUDA的ISP、HSB硬件上的软ISP实现,或NVIDIA Jetson AGX和NVIDIA IGX上的内部ISP。
 图片来源:英伟达
图片来源:英伟达Jetson AGX Orin 平台上的 HSB 管道以及 Jetson AGX Orin 上的 HW ISP Holoscan 传感器桥接器也可与 SW ISP 或 CUDA ISP 一起使用,类似于 IGX 管道。就 NVIDIA Jetson Thor 而言,管道中使用的是以太网摄像头,而非 NVIDIA ConnectX。
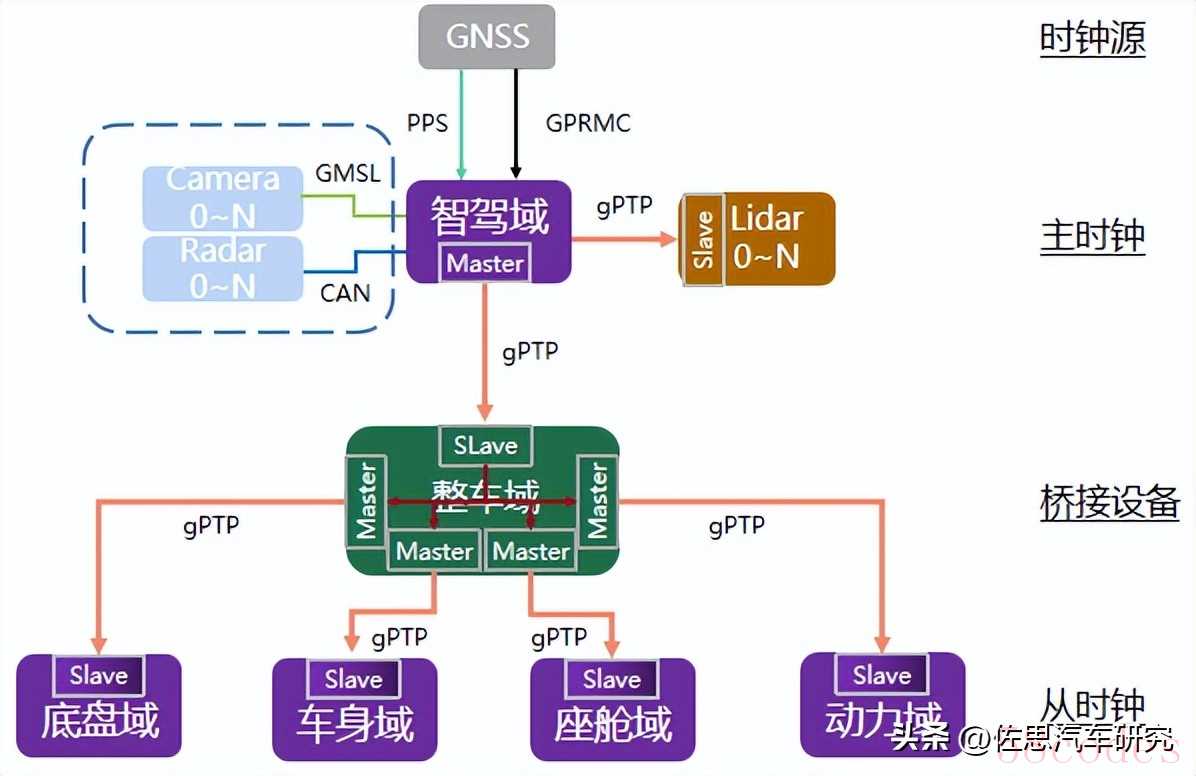
以太网的另一个好处是便于时间同步,严格讲只有车载和工业以太网才具备,这就是TSN协议中的802.1AS-2020,TSN即时间敏感网络,此功能使传感器桥接器能够将其内部时钟与主机系统同步,确保在采集时对每一项传感器数据进行精确的时间记。它可在 1 微秒内实现同步精度,并且精度通常超过 100 纳秒,一般都可以做到10纳秒,因此非常适合医学成像、机器人和自主系统中的高性能应用。借助准确的时间,开发者可以满怀信心地准确追踪每个传感器事件的发生时间,从而实现跨多个来源的数据对齐,并在分布式系统中进行可靠的协调。
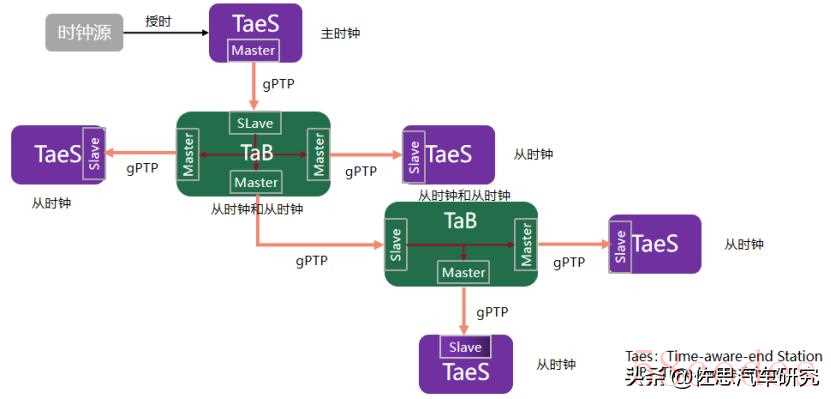
IEEE Std 802.1AS 对 IEEE 1588 进行扩展产生了gPTP协议,它用于TSN中的时间同步,为数据流的控制和管理提供时间参考。gPTP(generalized Precision Time Protocol,广义精确时间同步协议),基于PTP(IEEE 1588v2)协议进行了一系列优化,形成了更具有针对性的时间同步机制,可以实现μs级的同步精度。
 图片来源:网络
图片来源:网络主时钟是系统内的时间基准,一般具有更高精度的本地时钟,同时需要能够被高精度准时钟源(如卫星系统、原子钟等)授时,车内就是GNSS系统。主时钟在系统内可以动态分配,也可以预先分配(对于车载固定拓扑应用场景,多采用预先分配的原则)。gPTP中规定的主时钟动态分配机制为BMCA (Best Master Clock Algorithm,最佳主时钟选择算法)。系统上电唤醒之后,系统所有设备都可以通过发送一条报文来参与主时钟竞选,报文中含有各自设备的时钟信息。每一个参选设备都会比较自己的时钟信息和其它设备的时钟信息,并判断是否具有优势,如果不具有,则退出。
gPTP只能工作在MAC子层,PTP除了可以工作在MAC子层,还可以工作在传输层。工作在传输层时,报文要经历协议栈缓存、操作系统调度等过程,这两个过程都会带来传输延时的增加且大小不可控。而工作在MAC子层时,离物理层只有一步之遥,既能减缓协议栈缓存带来延时的不确定性,又能缩短报文传输延时。不过这意味着设备必须在硬件层面支持TSN,不能通过软件获得,也就是必须硬件支持802.1AS-2020,以前的芯片完全不可用。
汽车gPTP框架
 图片来源:网络
图片来源:网络HSB的多传感器时间同步
 图片来源:英伟达
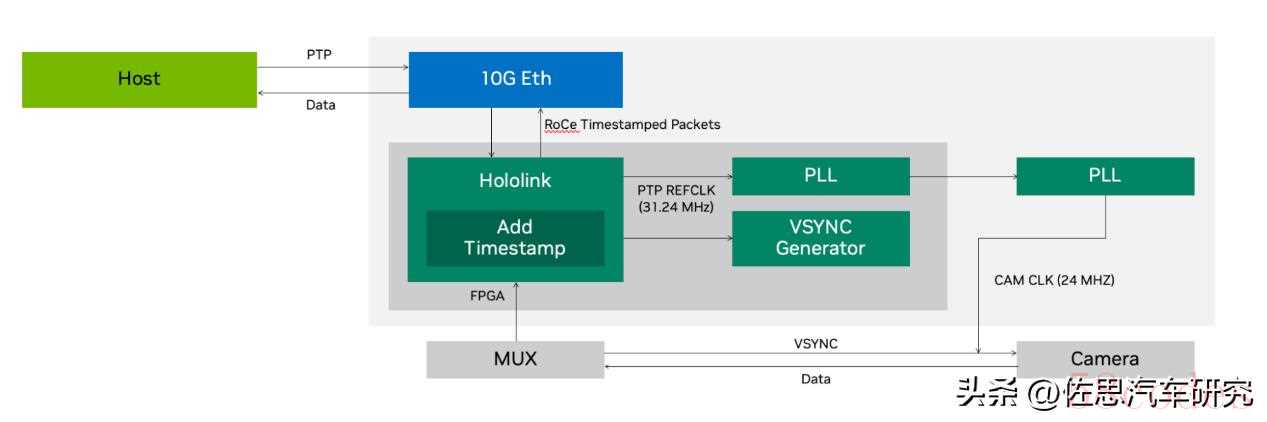
图片来源:英伟达Holoscan传感器桥图片
 图片来源:英伟达
图片来源:英伟达目前公版支持的是两个索尼的IMX247摄像头,有800万像素。Holoscan传感器桥是和Lattice合作的,用FPGA接收MIPI CSI格式,输出工业以太网格式。英伟达推荐用的Connect-X7 NIC网卡,最高支持400Gb的以太网。
Holoscan原理图
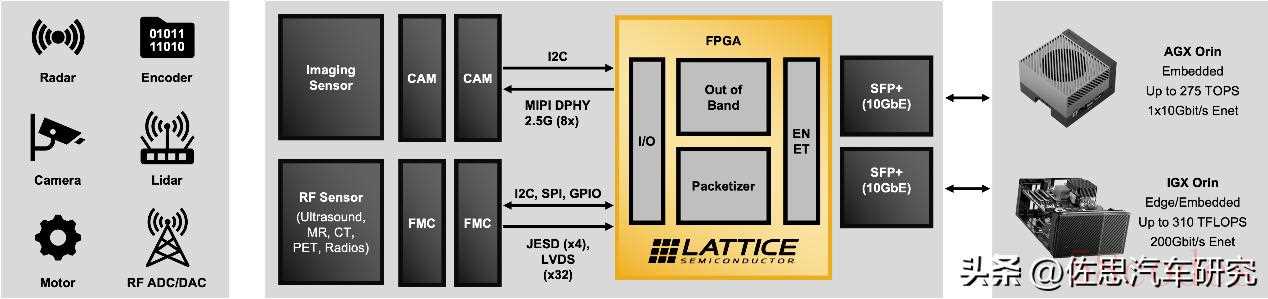 图片来源:Lattice(支持AGX Orin和工业领域的IGX)
图片来源:Lattice(支持AGX Orin和工业领域的IGX)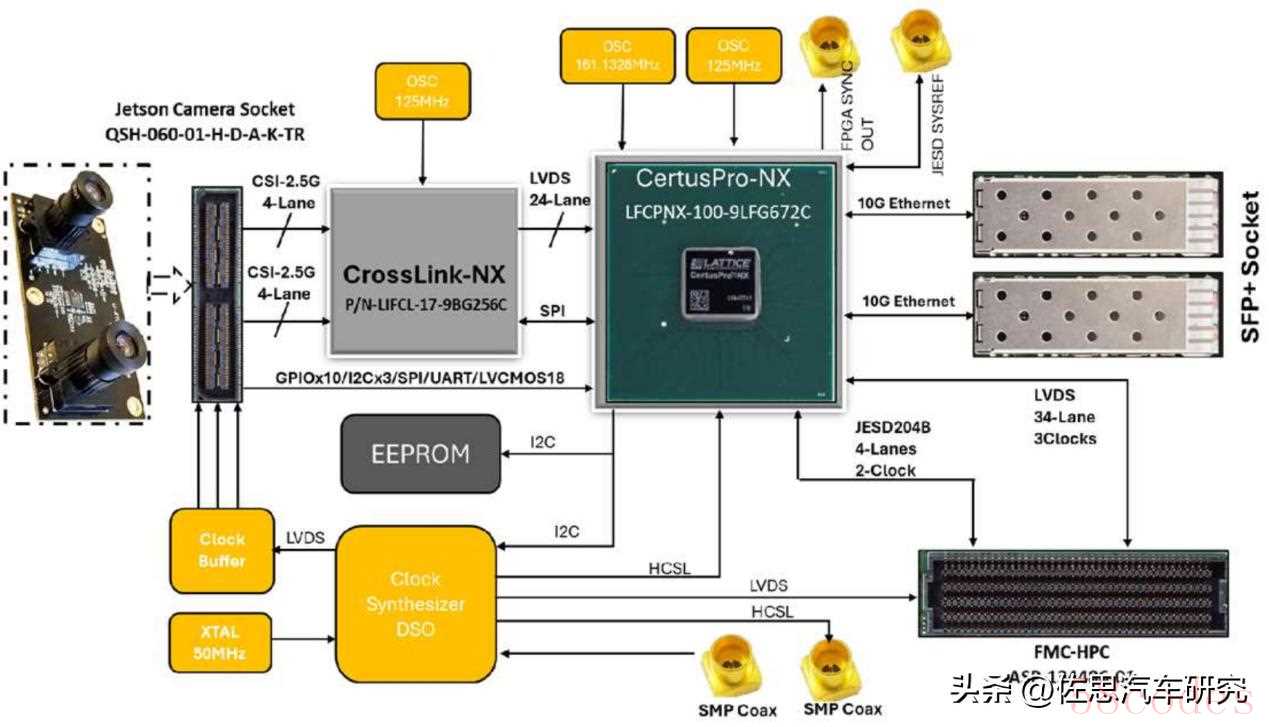 图片来源:Lattice
图片来源:Lattice包括两个IMX247摄像头模组,加上完整的PCB板以及连接器,零售价是420美元。
除了Lattice的方案外,英伟达还提供另外一种分辨率更高的方案,PolarFire Ethernet Sensor Bridge,采用索尼的IMX477摄像头,分辨率为1230万像素。
PolarFire Ethernet Sensor Bridge主板
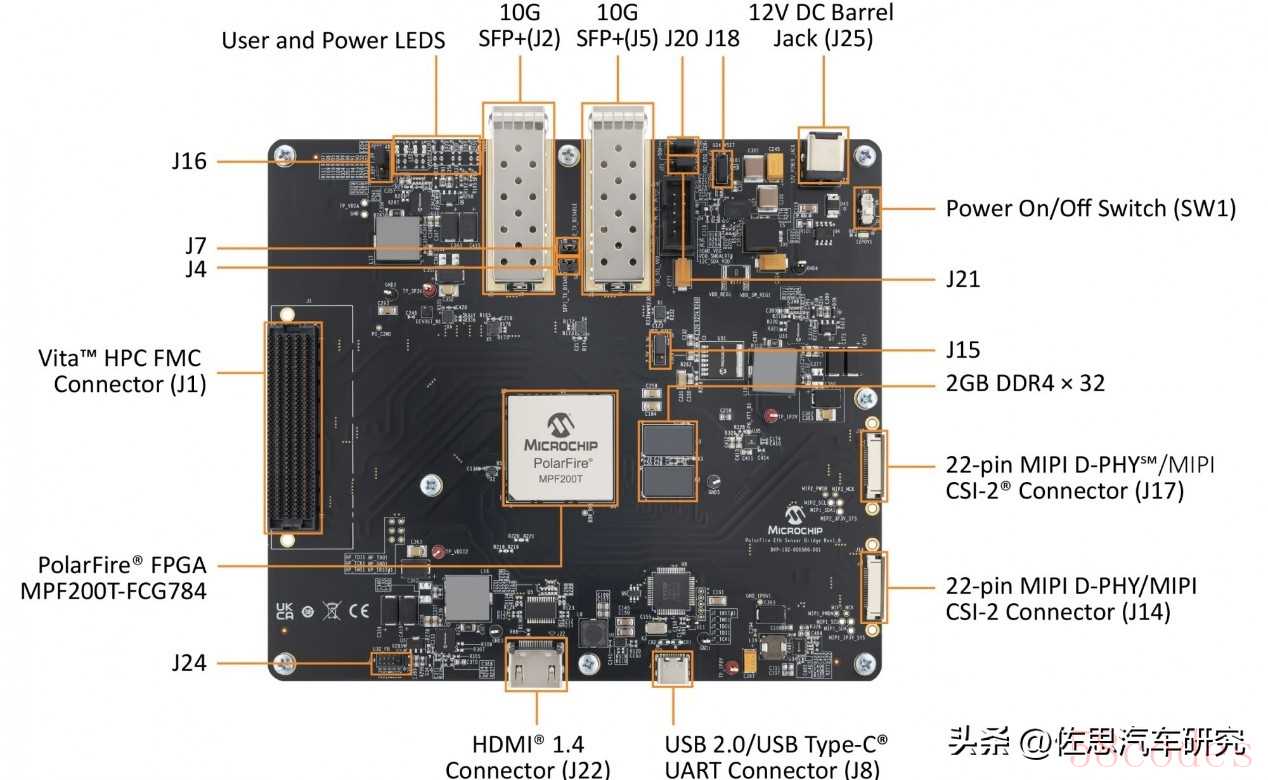 图片来源:Microchip
图片来源:MicrochipPolarFire Ethernet Sensor Bridge流程图
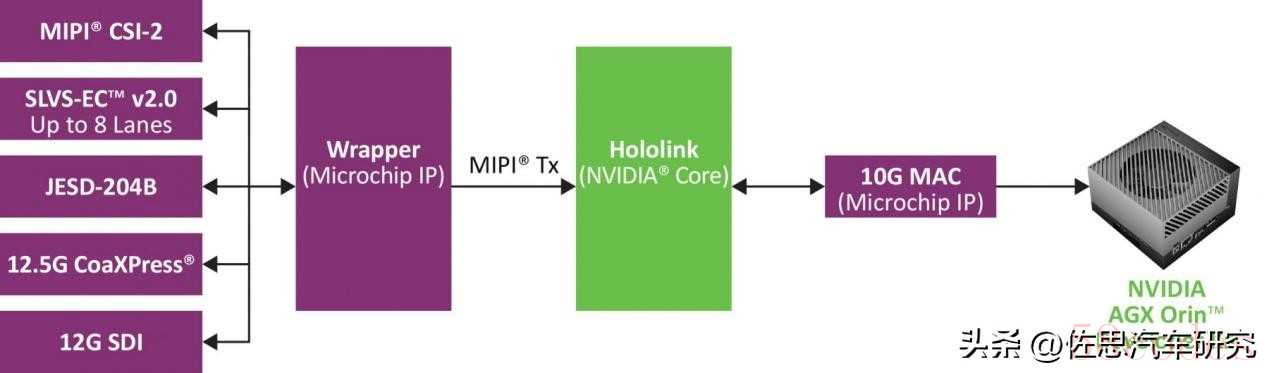 图片来源:Microchip
图片来源:Microchip包含一个IMX477M摄像头模组和其他全套板子及线缆,零售价1249美元,这个价格确实有点高了。
HSB的唯一缺点就是价格太高了,系统也过于复杂,使用了FPGA,还有接口转换芯片,车载领域肯定无法推广。
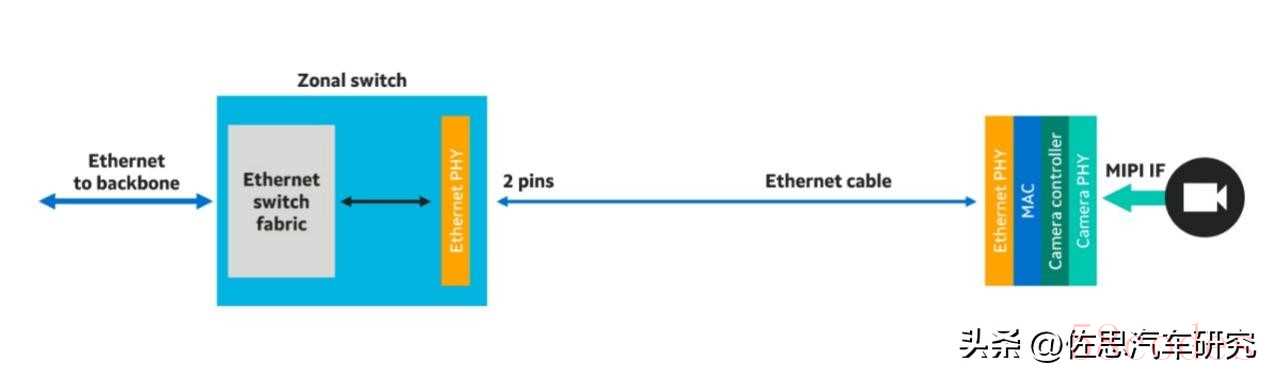 图片来源:Marvell(Infineon)
图片来源:Marvell(Infineon)车载领域要考虑成本、体积和可靠性,物理层、控制器、MAC需要都放到摄像头端,下篇会详细研究如何在车载领域用以太网取代解串行。
免责说明:本文观点和数据仅供参考,和实际情况可能存在偏差。本文不构成投资建议,文中所有观点、数据仅代表笔者立场,不具有任何指导、投资和决策意见。
 微信扫一扫打赏
微信扫一扫打赏
 支付宝扫一扫打赏
支付宝扫一扫打赏
